Nexus 6 尝试安装 ubuntu touch(二)

昨天粗略的看了一下相关的文档,很兴奋结果就是并没有仔细的阅读和了解,结果就导致很多东西都说的有失偏颇甚至有些错误和误导。因此,今天的任务就是把昨天错误的地方指正,说仔细一点。其次,就是分享一下第一次安装成功的喜悦心情,并附上相关源码和镜像以供大家使用。
说明
首先说一下 Halium 和 Ubuntu Touch 的关系。Halium 是一个硬件抽象层,不过具体是如何实现以及如何组织的这里就不说了,因为还没有彻底理解怕误人子弟,感兴趣的可以到这里了解更多。而 Ubuntu Touch 真的就是一个移动版的操作系统,因为暂时还没有 Nexus 6 的刷机。因此只能通过 Halium 来安装 Ubuntu Touch 官方出的 rootfs 来体验一下了。
下面简单说一下今天的任务,昨天的步骤有一点过于简单,其中内核配置和挂载点修改的地方最容易出错没有仔细说,所以今天就来看看到底怎么修复:
- 首先说明一下怎么配置设备相关代码的下载源问题。虽然Halium已经给出了相关配置,不过或许不是最新的源配置,检查一下总是放心一点。
- 下载好内核代码和驱动代码之后就是修改内核配置文件了。一般都是 codename_defconfig 文件,里面是一些关于编译哪些组件的配置,因此为了满足 Halium 的需求做相应的修改。
- 挂载点修复问题。应该是有关文件系统如何挂载的问题吧,如果不正确就启动不了。
- 初步尝试 Halium 的 rootfs。编译成功之后刷镜像,然后启动并配置相关IP,ssh 登录后看看相关效果。
配置源码仓库
这里就是配置设备相关源码的仓库,之后下载的时候就是从你配置的地方拉取过来。配置文件的路径是在:
halium/devices/manifests/[manufacturer]_[device].xml
如果你找不到你设备的配置文件,就新建一个,我的配置文件是 motorola_shamu.xml,其内容如下,当然这是我修改之后的:
<?xml version="1.0" encoding="UTF-8"?>
<manifest>
<remote name="lyo"
fetch="https://github.com/LineageOS"
revision="lineage-17.0" />
<project path="device/moto/shamu" name="android_device_moto_shamu" remote="los" />
<project path="kernel/moto/shamu" name="android_kernel_moto_shamu" remote="los" />
<project path="vendor/moto" name="proprietary_vendor_motorola" remote="them" />
</manifest>
这里的 project 就是一个配置项目,其中 path 是源码下载的目录,name 是远程仓库的名字,而 remote 则是远程仓库的地址别名。你可以看这里是官方支持的远程仓库,你可以使用
修改内核配置
昨天的脚步命令只是给出了一些配置建议,并没有自动修复相关的配置,其实这些配置我也不太理解是什么作用,反正先按照建议修改一下呗,以后再慢慢探索了。以我的配置文件为列,起目录在:
kernel/moto/shamu/arch/arm/configs/shamu_defconfig
然后使用如下命令查看输出结果,也就是一些警告和错误提示:
./mer-kernel-check/mer_verify_kernel_config kernel/moto/shamu/arch/arm/configs/shamu_defconfig
其输出结果如下,当然这是我修改之后再次运行的结果:
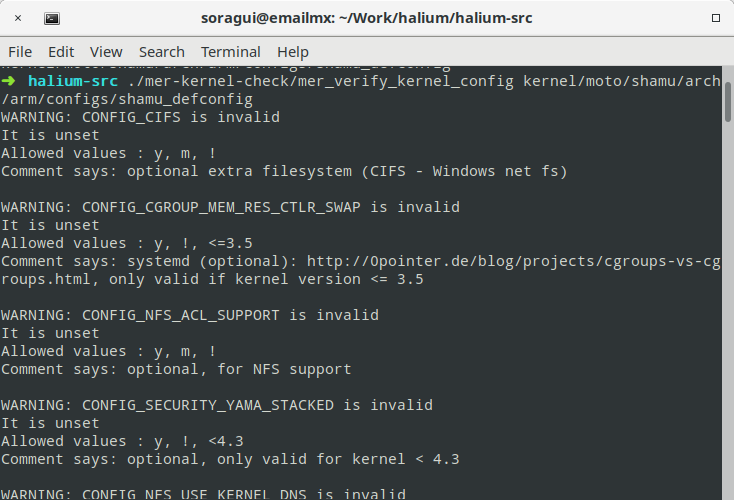
其中每一项都以换行分开了,就拿第一项做一个例子吧!最前面是一个大写的 WARNING,表示修不修改问题不大,然后就是第二行表示没有设置任何的值,第三行表示允许设置的值,第四行就是注释了,表明这个配置的是什么以及一些建议。
如何修改
这个很简单,用文档编辑器打开,然后查找相应的配置选项进行相应的修改就行了。如果你怕麻烦,只需要修改 ERROR 项就行了。你可以使用 grep 命令来看看有那些是必须要修改的项目。
最后,有两个配置没有写到检查里面,CONFIG_IKCONFIG 和 CONFIG_IKCONFIG_PROC ,这两个都要设置成 y,否则就无法启动了。可以参考官方文档查看。
挂载点修复
同样的以我的设备为例,挂载点修复脚步的位置为:
halium/hybris-boot/fixup-mountpoints
找到这个文件,打开后搜索 shamu ,看到有一些修复项目,不过还是要检查一下是不是齐全。下图是我修改后的结果:
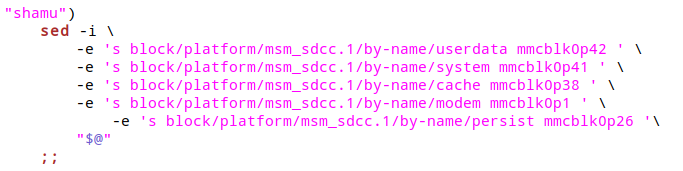
对比的话首先找到,设备相关的挂载文件,我的位置在:
device/moto/shamu/fstab.shamu
然后查看对比官方的修复脚本有没有漏掉的,所有的挂再点类型不是 auto emmc swap 的都需要修改,具体修改的值可以使用如下方面获取:
- 使用 adb shell 进入,并得到 root 权限。
- 使用 readlink -f [src] 获取挂载点的返回值
其中 src 就是你在 fstab 文件里面看到的第一列的值。获取了修复值之后就可以添加到相应的位置上去就行了。
结果
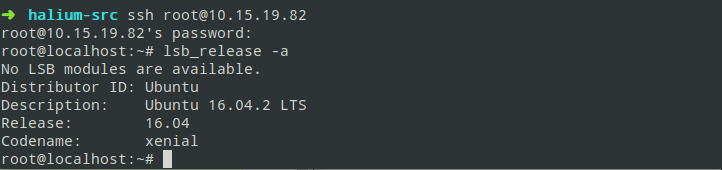
一切就绪之后就是编译了,成功之后下载两个镜像文件加文件系统,这里我下载的是 halium 官方文件系统,启动之后一直停留在开机画面上,只能通过 ssh 进入系统,步骤如下:
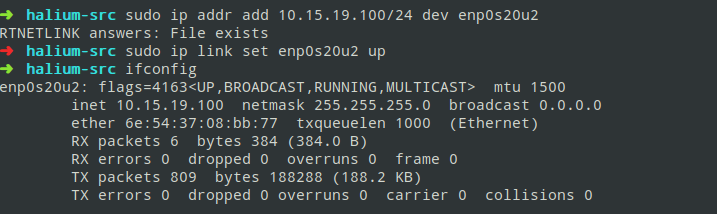
- Halium 默认启用了USB网络连接,查看手机IP即可。
- 更改电脑端相应接口的IP,让他们在同一个局域网中。
- 使用 ssh root@ip 登录即可。
具体步骤可以参考官方文档,这里就不详细说了,直接上图。

好了,今天就到这里,感觉还有好多东西没有描述清楚,不急以后慢慢探索、尝试。祝大家生活工作愉快,下期再见。
